About Me
I am a Project Assistant Professor in the Matsuo-Iwasawa Lab at The University of Tokyo, Japan. From 2021 to 2024, I was a Project Assistant Professor at Nagoya University, Japan, where I supervised or co-supervised Ph.D. and Master students. I have been working closely with Prof. Yasuhisa Hasegawa and with the research group of Prof. Liming Chen, Prof. Jan Peters, and Prof. Jian Huang. In 2021, I obtained my Ph.D. degree from Nagoya University, supervised by Prof. Yasuhisa Hasegawa. During my Ph.D. studies, I visited the Mechanical Systems Control Lab at the University of California, Berkeley, USA, where I was supervised by Prof. Masayoshi Tomizuka.
My research interests include tele-robotics, tactile sensing and feedback, shared autonomy, bilateral control, and foundation models enabled robotics.
I am open to collaborations; please feel free to contact me.
Contact Me
Email: yaonan.zhu@weblab.t.u-tokyo.ac.jp
Linkedin: linkedin.com/in/yaonan-zhu-4ab32a8b
Languages
Native in Japanese and Chinese, fluent in English. I know some French and German.
Selected Research Projects
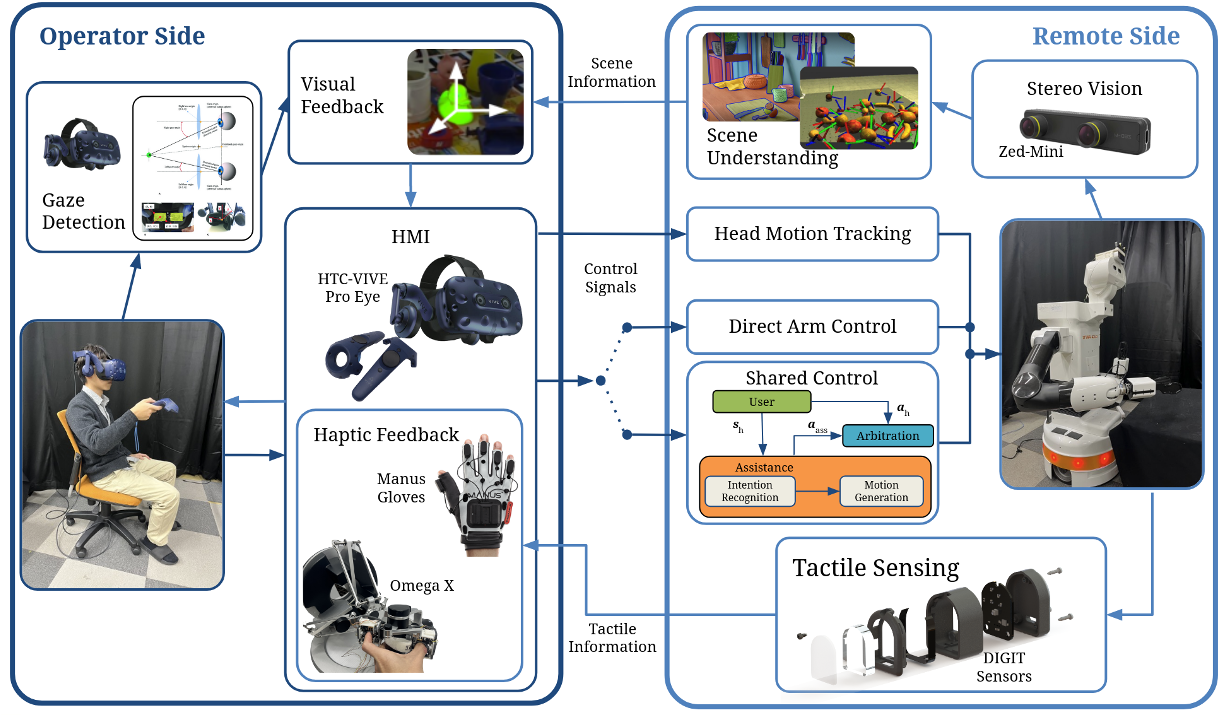
- Shared Autonomy and Teleoperation
This research focuses on developing shared autonomies that enable intuitive and efficient teleoperation of robots by combining AI-driven methodologies with human input, and is conducted by an international team from Japan, Germany, and France. [Link1], [Link2]
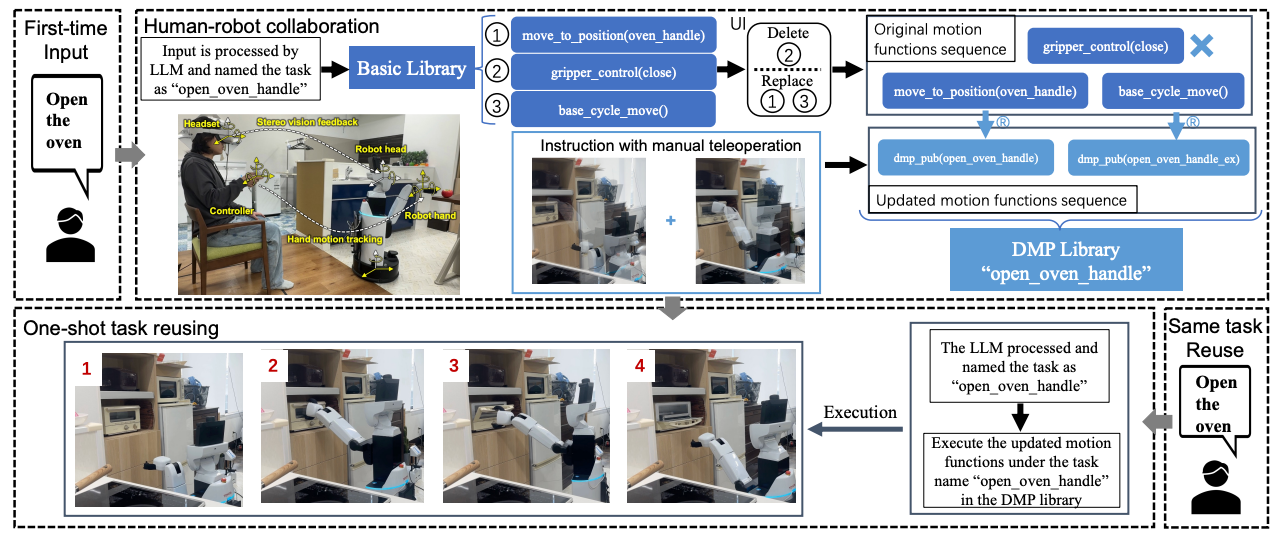
- Foundation Models Enabled Robotics
This research aims to enhance autonomous robotic manipulation through Human-Robot Collaboration (HRC) by leveraging foundation models to translate high-level language commands into actionable motion sequences, integrating teleoperation with Dynamic Movement Primitives (DMP) for skill learning and adaptation. [Link]
- Haptic Interfaces
This research develops a multi-point tactile interface capable of presenting shear forces alongside normal forces, allowing for real-time perception of object slippage and posture changes during dexterous in-hand manipulation, which was featured in the News Media. [Link]
- Tactile Sensing and Feedback
This research leverages vision-based tactile sensors such as DIGIT and Gelsight to estimate contact force, enabling force feedback through bilateral control. It aims to expand tactile feedback possibilities by feeding back both normal and shear forces utilizing novel tactile interfaces. [Link1] [Link2]
- Exoskeletons and Robotic Limbs
This research focuses on the development of exoskeletons and robotic limbs, exploring advanced control systems, biomechanics, and sensor technologies to enhance human mobility and strength, while emphasizing embodiment to create more seamless integration between users and robotic artifacts. [Link1], [Link2], [Link3]
- Learning Locomanipulation Policies
This research investigates the development of locomanipulation policies for legged robots, emphasizing whole-body control and reinforcement learning to achieve seamless integration of locomotion and manipulation. By leveraging Isaac Sim for sim-to-real transfer, it addresses challenges in deploying adaptive and robust policies in real-world environments. [Coming Soon]
- Learning Enhanced Robot Manipulations
This research investigates learning-enhanced robot manipulation, addressing challenges such as dexterous force-sensitive manipulation, teleoperation-based skill acquisition, and foundation model-enhanced perception and planning. By integrating classical control with data-driven methods, including reinforcement learning, it aims to develop generalizable and robust manipulation capabilities across diverse tasks and environments. [Coming Soon]
Fundings
- 遠隔操作および基盤モデルによる人型研究支援ロボットシステムの創成(JSTさきがけ)
(Development of a Humanoid Research Support System through Teleoperation and Foundation Models)
JST Strategic Basic Research Programs PRESTO Sakigake, 2025-2029, Principal Investigator - DEMETER: Development of adaptive pruning robots for sustainable viticulture through simulation
empowered AI, robot learning and Intuitive Teleoperation
(シミュレーションと直感的遠隔操作を活用したロボット学習による持続可能なブドウ栽培のための適応型剪定ロボット基盤の創成)
JST-ANR-BMBF Strategic International Collaborative Research Program (SICORP) EIG CONCERT-Japan, 2025-2028, Co-Principal Investigator - Human-Robot Collaboration Framework through Teleoperation and Large Language Models
(大規模言語モデルを活用した遠隔操作による人・ロボット協働基盤の創成)
JSPS Grant-in-Aid for Early-Career Scientists, 2024-2027, Principal Investigator - A General Purpose Exoskeleton for Teloperation based Robot Learning
(遠隔操作によるロボット学習のための汎用外骨格ロボットに関する研究)
Nagamori Foundation, 2025-2026, Principal Investigator - Embodied Interface for Enhanced Teleoperation of Intelligent Robots
(身体化インターフェイスを介したスマートロボットの遠隔操作に関する研究),
JSPS Grant-in-Aid for Early-Career Scientists, 2022-2024, Principal Investigator - CHIRON (AI empowered general purpose assistive robotic system for dexterous object manipulation through embodied teleoperation and shared control), JST-ANR-DFG Trilateral AI Research, 2020-2024, Primary Researcher
- Astérix (Edge AI Transformer based Adaptable Human Robot Collaboration System for Smarter Industry 4.0X), JST-ANR Strategic International Collaborative Research Program , 2023-2027, Participation
Memorable Moments
We have received Best Paper Awards from IEEE International Conference on Mechatronics and Automation (ICMA 2024).

Institutional Journey
Here are the universities I have been affiliated with:





